李 陶 龚 静 郑明武 李芋汶 杨正颖 邹洪宇 郭金岳 邓 璇 任万军 胡剑锋 雷小龙,*
(1.四川农业大学 机电学院,四川 雅安 625014;2.四川农业大学 作物生理生态及栽培四川省重点实验室,成都 611130;3.四川天府新区乡村振兴研究院,成都610213)
化肥是重要的农业生产资料,施用化肥已成为许多国家提高粮食产量的重要手段之一[1-2]。施肥作业过程存在施用量大且分布不均匀,造成环境污染、化肥利用率低等问题,严重制约了农业绿色可持续发展[3-5]。精量同步施肥是降低化肥施用量和提高化肥利用率的重要途径,设计性能优良的排肥装置与控制系统是保证排肥精确的关键[6]。
外槽轮式排肥器具有结构简单、成本低廉和维护方便等优点,是国内外广泛应用的施肥装置[7]。为实现精量、均匀排肥,已有研究采用优化设计外槽轮排肥器结构或提升控制系统性能的方式来实现[8-11]。针辊式排肥轮通过增加排肥轮转速可以提高排肥量均匀性[12];双齿轮结构的排肥器提高排肥均匀性,并通过调节排肥轮的转速精确调整排肥量[13];以交错直齿式排肥轮为供肥关键部件与气力输送分配相结合,满足施肥量要求且具备较好的均匀性[14];倾斜螺旋状型孔结构有利于充肥和排肥,具有较好的各行排肥量一致性和排肥均匀度[15-16]。长江中下游地区土壤含水率高,地轮驱动施肥适应性较差,一般采用主动施肥方式,需设计施肥量随前进速度变化而自动调整的同步施肥控制系统[17-18]。为实现与作业速度同步实时控制施肥量,Alameen等[19]设计的双变量施肥试验台,可以通过气缸调节排肥器开度,精准、稳定并快速地控制排肥量;基于CAN总线通讯技术与GNSS系统设计了双变量施肥控制系统,利用GNSS系统获取准确定位信息,并通过电机与推杆实时同步控制施肥量,可实现精准变量的施肥作业[20];赵学观等[21]提出北斗单点测速与地轮测速结合的双测速模式,提高了玉米追肥机控制系统的测速精度和可靠性。综上,通过优化排肥器结构可提高排肥精确度和均匀性,GPS系统应用于施肥控制系统可实现同步控制施肥量,但排肥均匀性和准确度需进一步研究。
本研究拟设计一种采用“集中排肥+风送输肥”方式的风送式集中排肥装置,并开发同步施肥控制系统;设计直槽、交错槽与螺旋槽排肥轮,通过台架试验优选排肥轮;建立风送式集中排肥装置的排肥轮转速-排肥速率线性回归方程模型,根据北斗+GPS系统监测的行驶速度实时调节施肥量,以期为排肥系统设计与性能提升提供参考。
1.1 风送式集中排肥系统结构
本研究所设计的风送式集中排肥系统由排肥装置、风送输肥装置和施肥控制系统组成(图1),其中排肥装置包括肥料箱、外壳、电机、排肥轮、搅肥轴和平口排肥舌等;风送输肥装置主要由风机、导肥管和输肥管组成;施肥控制系统的触摸屏、北斗+GPS测速模块等接入控制器。排肥装置的排肥轮与空白轮交错排列安装排肥轴上,排肥轮与排肥支撑座体之间形成一个独立区域,搅肥轴位于排肥轮侧上方,电机驱动搅肥轴、排肥轴转动,促进颗粒化肥流动性,排肥轮转动带动并在平口排肥舌共同作用下强制排肥到气固混合腔。风送输肥装置采用6个风机为气固混合腔分别提供风力,实现6行输送排肥。施肥控制系统通过北斗+GPS测速模块检测作业速度,并控制电机转速,从而实现同步排肥。
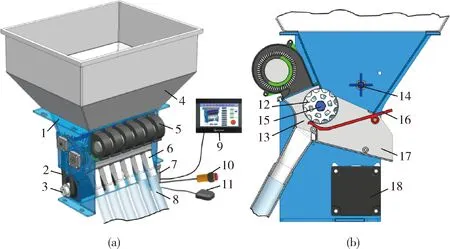
1.外壳;2.同步齿形带;3.同步轮;4.肥料箱;5.风机;6.导肥管;7.控制器;8.输肥管;9.触摸屏;10.柱形光电开关;11.北斗+GPS测速模块;12.排肥轮;13.气固混合腔;14.搅肥轴;15.排肥轴;16.平口排肥舌;17.排肥支撑座体;18.电机1.Shell;2.Belt;3.Synchronized wheel;4.Fertilizer box;5.Fan;6.Fertilizer guiding tube;7.Controller;8.Fertilizer tube;9.Display screen;10.Cylindrical photoelectric switch;11.BDS and GPS speed measurement module;12.Fertilization wheel;13.Gas-solid mixing chamber;14.Fertilizer mixing shaft;15.Fertilization shaft;16.Flat tongue;17.Fertilizer support base;18.Motor图1 风送式集中排肥系统三维图(a)和截面图(b)Fig.1 Three-dimensional view (a) and section (b) of air-assisted centralized fertilization system
1.2 工作原理
风送式集中排肥系统工作时,启动施肥控制系统,校准排肥量后在触摸屏上设定施肥量、作业幅宽等参数,启动风机,农机的动力机械抬升臂放下触发柱形光电开关传感器,排肥电机转速根据北斗+GPS测速模块测量的作业速度进行调节。电机驱动排肥轮与搅肥轴转动,颗粒化肥在搅肥轴与重力的作用下进入到排肥轮凹槽内,通过排肥轮转动强制排入气固混合腔,风送输肥装置利用高速气流在气固混合腔产生文丘里效应,颗粒化肥在气流与重力的作用下输送至输肥管道,完成排肥过程。
2.1 排肥轮设计
集中排肥装置的关键部件是排肥轮,为提高排肥均匀性,降低排肥脉动现象,设计螺旋槽排肥轮结构参数,并与直槽、交错槽排肥轮进行对比试验。由排肥器工作原理可知,集中排肥装置单个排肥轮每转的排肥量Q0是强制层排肥量Q1与带动层排肥量Q2之和[22-24]:
Q0=Q1+Q2
(1)
其中
(2)
式中:Q0为单个排肥轮每转的排肥量,g/r;α为凹槽内颗粒化肥的填充系数,本研究取0.8;Z为排肥轮每周槽数,个;l为排肥轮有效工作长度,mm;γ为颗粒化肥容重,kg/m3;S为单个凹槽截面积,mm2;R为排肥轮半径,mm;λ为带动层的特性系数,本研究取0.3。
本研究设计的螺旋槽排肥轮为圆弧形凹槽。螺旋槽排肥轮的端面局部和回转面投影见图2。
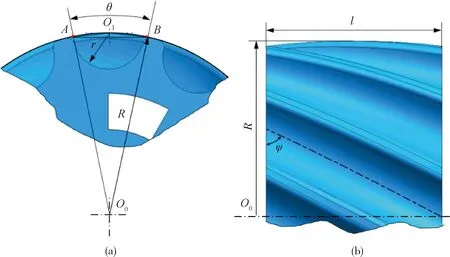
O0为排肥轮的轴心;O1为凹槽的轴心,且在排肥轮圆周上;r为凹槽半径;A与B点为凹槽在排肥轮圆周上的截面起始、终止点;θ为单个凹槽在排肥轮上的圆心角;R为排肥轮半径;l为排肥轮的有效工作长度;ψ为螺旋凹槽在排肥轮圆周上的螺旋升角。O0 is the axis of fertilizing wheel.O1 is the axis of the groove and on the circumference of the fertilizer discharge wheel.r is the groove radius.Points A and B are the starting and ending points of the section of the groove on the circumference of the fertilizer discharge wheel.θ is the central angle of a single groove on the fertilizer row wheel.R is the radius of fertilizer discharge wheel.l is the effective working length of fertilizer discharge wheel.ψ is the spiral rising angle of the spiral groove on the circumference of the fertilizer discharge wheel.图2 螺旋槽排肥轮的端面局部视图(a)和回转面投影(b)Fig.2 Partial view of end face (a) and rotary surface projection (b) of spiral groove fertilizer wheel
由图2(a)可知,排肥轮单个凹槽截面积S为扇形O0AB面积S1与三角形O0AB面积S2的差加上扇形O1AB面积S3与三角形O1AB面积S4的差:
S=S1-S2+S3-S4
(3)
其中
(4)
式中:S为单个凹槽截面积,mm2;r为凹槽半径,mm;θ为单个凹槽在排肥轮上的圆心角,(°)。
为保证螺旋槽排肥轮相邻两凹槽首尾相接,螺旋升角ψ应满足:
(5)
集中排肥装置的供肥速率Qm与农艺要求的施肥速率Qs分别为:
Qm=Q0Nn
(6)
Qs=6QtMv
(7)
式中:Qm为集中排肥装置的供肥速率,g/min;Qs为农艺要求的施肥速率,g/min;Qt为农艺要求的单位面积理论施肥量,kg/hm2;N为排肥轮数量,个;n为排肥轮转速,r/min;M为施肥作业幅宽,m;v为施肥作业速度,m/s。
由式(6)和(7)可知,集中排肥装置的供肥速率Qm与农艺要求的施肥速率Qs相等,则:
(8)
综上,供肥速率与排肥轮直径、槽数、凹槽容积和转速密切相关。当供肥速率相同时,排肥轮槽数随着直径的减小而减少,排肥均匀性变差,为满足施肥量的调节范围,通过改变排肥轮转速调节排肥速率,但排肥轮转速过高会降低充肥时间,颗粒化肥无法及时充满凹槽,影响排肥性能[22-24]。根据农艺施肥量及排肥性能要求,确定直槽、交错槽和螺旋槽排肥轮的直径为60 mm,圆弧形凹槽半径为6 mm,排肥轮有效工作长度为30 mm,在保证槽轮齿脊强度与排肥均匀性的条件下,槽数为8~15,本研究取槽数为12个;螺旋槽与直槽、交错槽排肥轮区别在凹槽排布(图3),螺旋槽排肥轮的凹槽呈螺旋排布,螺旋升角为62.4°,直槽排肥轮的轴心线与凹槽轴心线平行,交错槽排肥轮左右凹槽交错0.5个周期。

O0为排肥轮的轴心;O1为凹槽的轴心;O2为相邻凹槽的轴心。O0 is the axis of fertilizing wheel.O1 is the axis of the groove.O2 is the axis of adjacent grooves.图3 直槽(a)、交错槽(b)和螺旋槽(c)排肥轮Fig.3 Straight groove (a),staggered groove (b) and spiral groove (c) fertilization wheel
2.2 风送输肥系统设计
风送输肥系统主要参数设计包括输送气流速度、输送风量、输送管内径和风机的选型。输肥管内输送气流速度vs的计算公式[25]为:
(9)
式中:vs为输肥管内输送气流速度,m/s;kp为颗粒尺寸系数,一般为16~20;ρp为颗粒密度,kg/m3;kd为颗粒性质系数,一般为2×10-5~5×10-5;L为输肥管长度,m。
化肥的颗粒直径一般为2~4 mm,颗粒化肥的密度为900~1 400 kg/m3,输肥管长度约2 m,颗粒性质系数对输送气流速度影响甚微,忽略不计;气流速度为满足多数颗粒化肥的使用,根据化肥的最大颗粒直径和最大化肥密度,取颗粒尺寸系数为16,化肥密度取1 400 kg/m3,则输肥管内输送气流速度理论值为18.93 m/s;考虑到田间作业工况恶劣,实际输肥管内输送气流速度应达到21 m/s。长江流域油菜等作物播种的作业速度一般为3~5 km/h,作业幅宽1.8 m,按照作业效率0.9 hm2/h,施肥量按照600 kg/hm2计算,输肥系统输送率W为540 kg/h。为保证颗粒化肥在输肥管路中顺利输送而不被堵塞,选定单位时间肥料质量与气流质量的混合比c为1.2[26],表达式为:
(10)
其中:
(11)
式中:Gp为输肥管内肥料流量,kg/h;Gs为输肥管内空气流量,kg/h;W为输肥系统输送率,kg/h;ρs为空气密度,取1.2 kg/m3;d0为输肥管内径,mm。
根据式(11)可知,输肥管内径d0和输送流量Qs分别为:
(12)
(13)
由式(12)和(13)可知,选用32 mm内径的输肥管,风机输送流量应大于375 m3/h,根据风送输肥系统对风速与风量的要求,选用调速风机台达BFB1012EH-F00,工作电压DC12 V,额定功率36 W,风量78.2 m3/h,风送输肥系统使用风机数量为6个。
2.3 同步施肥控制系统设计
2.3.1硬件设计
施肥控制系统依托动力机械的12 V直流电源,设有12~24 V的升压器。采用TK6071IQ触摸屏,该触摸屏通过RS485与控制器串口通讯(图4)。触摸屏设置初始参数及校准后,作业机具放下时触发安装在机具抬升臂上的E3F-DS30C4柱形光电开关,进入工作状态;北斗+GPS测速模块获取作业速度并传输至CX3G-16MT控制器(Coolmay公司),经过数据分析处理后发送脉冲信号至闭环步进电机驱动器,调整闭环步进电机(型号为86EBP147ALC-TK0)转速带动排肥轮工作,以实现同步控制排肥量,在排肥过程中,6个风机转速随排肥速率实时调整。施肥控制系统使用7个PU-FD5BL卧式光电开关,分别对肥料箱低余量、输肥管堵塞进行监测,若在工作过程中,出现肥料箱缺肥、输肥管堵塞和电机故障等意外状况,将触发报警信号并反馈至触摸屏。施肥控制系统工作流程见图5。

1.12 V直流电源;2.升压器;3控制器;4.触摸屏;5.北斗+GPS测速模块;6.柱形光电开关;7.卧式光电开关;8.风机;9.闭环步进电机驱动器;10.闭环步进电机1.12 V DC power supply;2.Voltage booster;3.Controller;4.Touch screen;5.BDS+GPS speed measurement module;6.Column photoelectric switch;7.Horizontal photoelectric switch;8.Fan;9.Closed loop stepping motor driver;10.Closed loop stepping motor图4 施肥控制系统原理及组成Fig.4 Principle and composition of fertilization control system
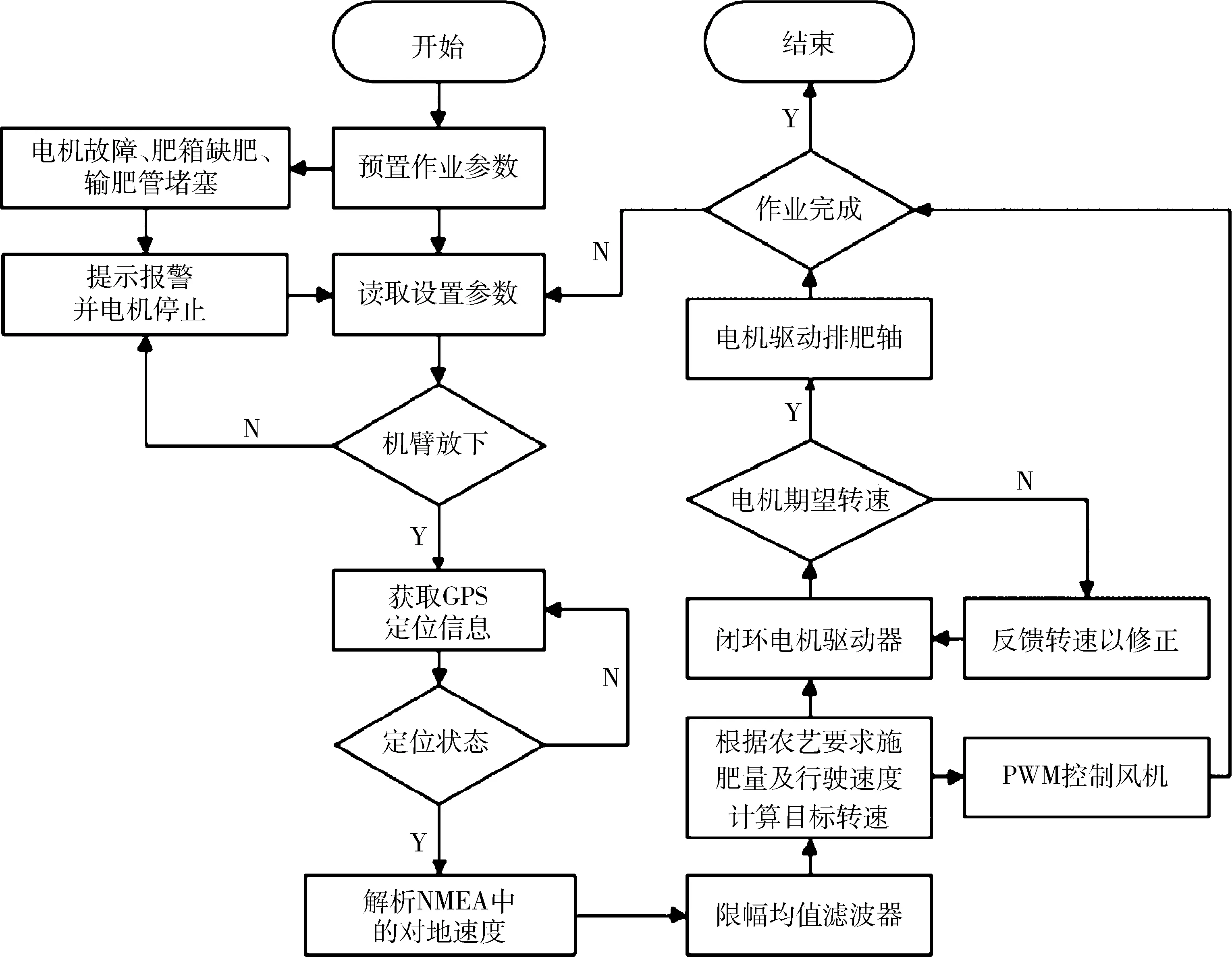
图5 施肥控制系统工作流程Fig.5 Operating process of fertilization control system
2.3.2控制方法
施肥控制系统选用的北斗+GPS测速模块型号是ATK1218-BD,通讯速率为20 Hz,对地速度精度<0.1 m/s。在田间作业过程中,北斗+GPS模块获取的原始对地速度有噪声及异常信号,无法准确反映行驶速度。数字滤波算法是滤除噪声干扰,提高测量精度的有效方法[27-28],因此综合应用限幅滤波和递推平均值滤波算法,以实现施肥控制系统对异常对地速度信号的抑制,消除瞬时波动影响,平滑速度信号,实现准确监测行驶速度。限幅滤波算法[29]为:
(14)
式中:Yk为本次限幅滤波后采集的速度最终值;Xk为当前速度采集值;Xk-1为上一时刻速度采集值;Ae为限幅滤波最大速度误差值。由式(14)可知,若当前速度采集值与上一时刻速度采集值之差≤限幅滤波最大速度误差值时,则当前速度采集值为本次采集的速度最终值;否则当前速度采集值被定义为异常信号,则将上一时刻速度采集值赋值到本次采集的速度最终值。采用型号为BWT901BLE5.0的加速度计测量平坦路面上作业时的加速度,获得加速度峰值为4.64 m/s2,经换算后可用于限幅滤波最大速度误差。当北斗+GPS模块输出的对地速度经过限幅滤波剔除异常信号后,进行递推平均值滤波[30],表达式为:
(15)
式中:T为采样个数,本研究取10;vm为第k次采集滤波后的速度输出值,m/s。
由式(6)可知,集中排肥装置的供肥速率Qm随着排肥轮转速n的增加而提高,且已有研究表明排肥速率与排肥轮转速有良好的线性关系[15-16],则排肥速率与排肥轮转速的线性函数表达式为:
Qm=Asn+Bi
(16)
式中:As为斜率;Bi为截距。
在施肥控制系统中,经滤波处理后的速度输出值vm等于施肥作业速度v,即vm=v;且集中排肥装置的供肥速率Qm应等于农艺要求的施肥速率Qs,则由式(7)与式(16)可知施肥控制系统的目标转速为:
(17)
2.3.3人机交互界面
施肥控制系统通过TK6071IQ触摸屏(WEINVIEW公司)进行人机交互,利用RS485串口通讯协议与控制器通讯,使用软件EasyBuilder Pro设计了人机交互界面,包括初始设置和运行监测2个界面(图6)。初始设置界面设置幅宽、单位面积理论施肥量,施肥控制系统引用校准值以适应不同的颗粒化肥。执行校准程序时,排肥电机以60 r/min的转速运行10 s,将所排出肥料的总重量输入至校准值中完成校准;运行监测页面可对作业参数信息实时监测,当监测到运行故障时界面内指示灯闪烁报警提示。

图6 初始设置(a)和运行监测(b)的人机交互界面Fig.6 Initial setting (a) and operation monitoring (b) of HMI
3.1 试验材料及方法
3.1.1排肥装置性能试验
选用中化化肥为供试颗粒化肥,氮、磷、钾质量比为15∶15∶15。参照NY/T 1003—2006《施肥机械质量评价技术规范》[31]开展台架试验,对比直槽、交错槽和螺旋槽排肥轮的排肥性能,排肥性能评价指标包括各行排肥量一致性、排肥量稳定性与排肥量均匀性的变异系数。排肥轮转速设置为10~60 r/min,增量为 10 r/min,试验时间为60 s,重复5次,分别收集各排肥口的肥料进行称重,并计算各行排肥量一致性与排肥量稳定性变异系数。采用具有RS232通讯口功能的电子秤对各排肥口进行动态称重[32],电子秤的通讯速率为150~200 ms,实时记录60 s的排肥流量变化,并综合计算6行的总排肥量均匀性变异系数。
3.1.2控制系统性能试验
为验证施肥控制系统的性能利用排肥动态试验台架(图7),开展施肥控制系统的施肥流量调整的响应时间、施肥量准确率试验,并检验排肥系统对不同化肥的适应性。参照GB/T 35487—2017《变量施肥播种控制系统》[33]等相关实验方法。选取中化化肥,设置排肥目标转速为20、40和60 r/min,开展施肥流量调整的响应时间试验,施肥控制系统从初始转速0 r/min增至目标转速,重复3次,获取静止状态至理论施肥流量调整的响应时间;选取中化化肥开展施肥量准确率的田间试验,并选取汉枫缓释掺混肥料与美丰比利夫复合肥验证风送式集中排肥系统适应性,其中汉枫和美丰肥料的氮、磷、钾质量比分别为30∶6∶12、22∶9∶9,将风送式集中排肥装置安装于插秧机上,并在输肥管口处设置收集容器,幅宽为1.8 m,作业速度保持在4~6 km/h行驶,依次设定施肥量为300、450和600 kg/hm2,行进20 m后停止排肥,重复3次并称取排肥量。

1.肥料箱;2.数据采集端;3.可通讯电子秤;4.肥料收集容器;5.控制器;6.集中排肥装置。1.Fertilizer box;2.Data acquisition terminal;3.Communicable electronic scale;4.Fertilizer collection container;5.Controller;6.Centralized fertilization device.图7 排肥动态试验台架Fig.7 Dynamic test bench
3.2 结果及分析
3.2.1凹槽结构对排肥性能的影响
3种排肥轮结构的排肥轮转速与排肥量拟合方程决定系数R2>0.999(图8),表明排肥轮转速与排肥速率呈良好的线性关系。
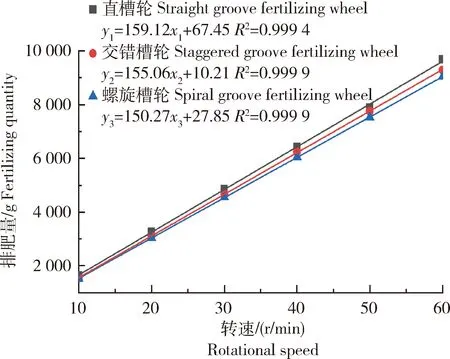
图8 转速与排肥量的关系Fig.8 Relationship between rotational speed and fertilizing quantity
排肥轮转速为10~60 r/min时,随着排肥轮转速的增大,不同结构的排肥轮各行排肥量一致性变异系数均呈降低趋势,各行排肥量一致性变异系数最大值为2.67%(图9);相同转速下,各行排肥量一致性变异系数关系总体表现为:交错槽排肥轮<螺旋槽排肥轮<直槽排肥轮。各槽型排肥轮的排肥量稳定性变异系数趋势稳定,变异系数均小于0.9%;直槽与交错槽排肥轮在60 r/min下的排肥量稳定性变异系数有轻微上升趋势。

图9 各排肥轮在不同转速下的各行排肥量一致性(a)和排肥量稳定性(b)Fig.9 Consistency (a) and stability (b) of fertilization quantity of each row of fertilizing wheels at different rotational speeds
不同排肥轮结构的排肥量均匀性变异系数差异较小,总排肥量均匀性变异系数随转速的增加而降低(表1);螺旋槽排肥轮在各转速下均有良好的均匀性能,排肥均匀性能表现为,螺旋槽>交错槽>直槽。

表1 不同排肥轮结构和转速下的排肥均匀性能Table 1 Fertilization uniformity of different fertilization wheel structure and rotational speed
综合评价各行排肥量一致性变异系数、排肥量稳定性变异系数及排肥量均匀性变异系数,根据精量施肥要求,赋予各项性能指标权重,得到性能评价结果见表2。可知,直槽、交错槽和螺旋槽排肥轮的综合性能评价系数分别为7.07、5.94和5.33,交错槽和螺旋槽排肥轮的综合评价系数显著低于直槽排肥轮,螺旋槽排肥轮的综合排肥性能更优。

表2 不同排肥轮结构和转速下排肥性能评价结果Table 2 Evaluation of fertilization performance of different fertilization wheel structure and rotational speed %
3.2.2施肥控制系统的性能
对滤波前后的作业速度信号进行对比结果见图10。北斗+GPS测速模块运行稳定,限幅递推平均值滤波算法能有效滤除噪声和异常信号,提高了作业速度的监测精度,但存在监测滞后问题。根据北斗+GPS模块的通讯频率和递推平均值滤波算法的采样个数可知,滤波导致的初始车速监测滞后时间为0.5 s;当机具停止行进时,滤波处理后的车速监测不受影响,具有良好的制动监测性能。

图10 滤波前后作业速度信号对比Fig.10 Comparison of operation speed signal before and after filtering
由施肥流量调整的响应时间(图11)可知,在相同转速条件下,3次重复试验所得施肥流量曲线差异较小;不同转速下,各施肥流量稳定后曲线趋近于相应转速的理论施肥流量曲线。根据电子秤的通讯速率范围及施肥流量调整的响应时间,排除初始颗粒肥料对电子秤的冲击影响,施肥流量调整的响应时间随着排肥轮转速的提高而延长;排肥轮转速从零速状态增至60 r/min,并趋近于稳定的理论施肥流量时,施肥流量调整的最长响应时间T约为0.85 s。
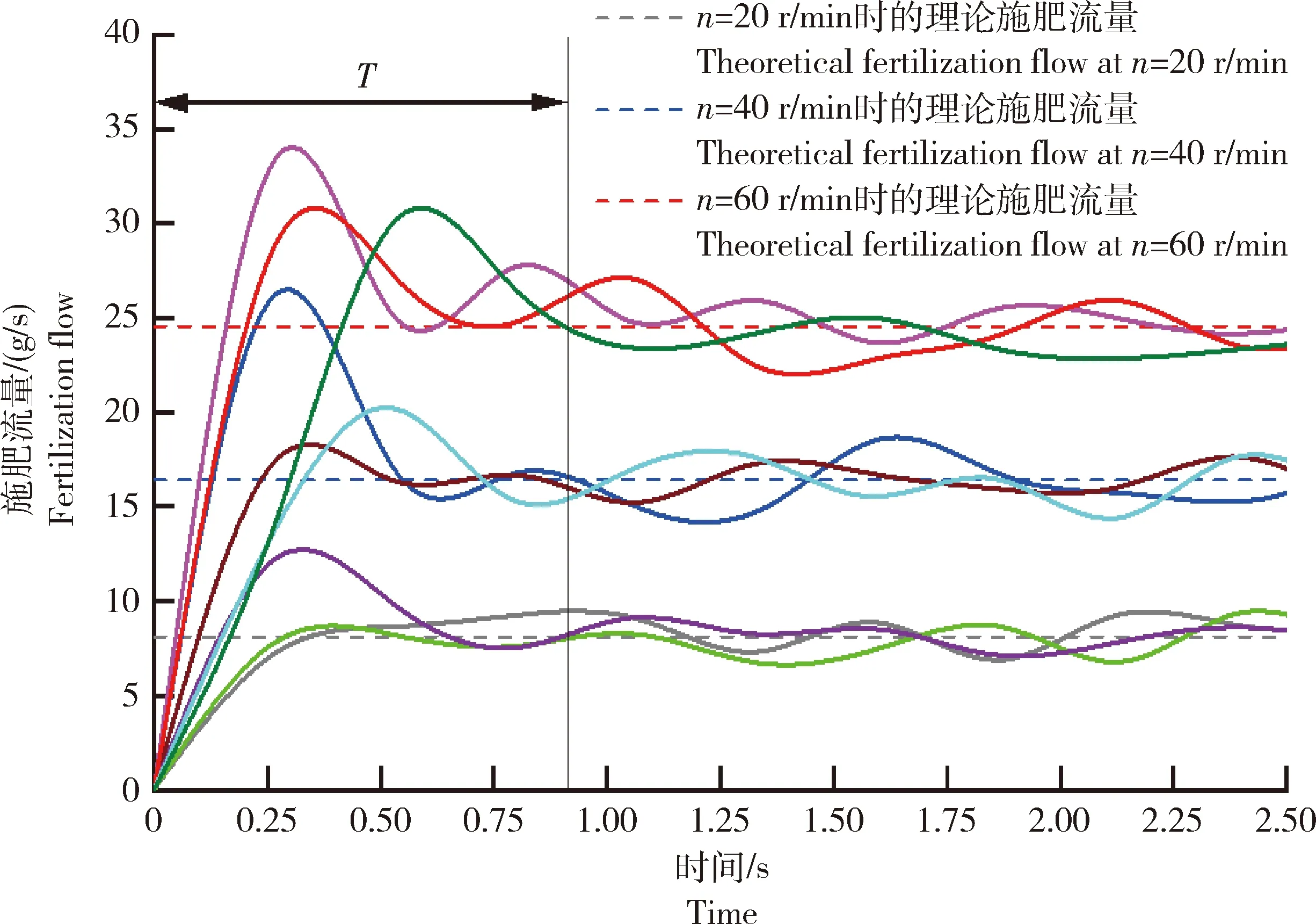
T为施肥流量调整的最长响应时间;n为排肥轮转速。T is the longest response time of fertilization flow adjustment.n is the rotation speed of the fertilizing wheel.图11 施肥流量调整的响应时间Fig.11 Response time of fertilizer flow adjustment
3.3 田间试验
使用VP8D洋马插秧机机头搭载风送式集中排肥装置和施肥控制系统,于四川农业大学雅安教学科研园区内开展田间试验(图12)。施肥控制系统电源来自插秧机车载电源,使用中化、汉枫和美丰化肥,设定施肥量为300、450和600 kg/hm2,试验前校准施肥控制系统以适应肥料,并全速开启输肥风机,收集排肥装置作业面积为36 m2的施肥量。
田间试验时,平均作业速度为5.22 km/h,不同施肥量与肥料类型下的施肥量准确率见表3。可见,施肥准确率均高于95.00%,综合施肥准确率平均值为96.89%。本研究的施肥控制系统在各施肥量要求均有较好的控制精度。

1.风送式集中排肥装置;2.VP8D插秧机机头;3.输肥管;4.收集网袋;5.北斗+GPS天线;6.施肥控制器。1.Air-assisted centralized fertilization device;2.VP8D rice transplanting locomotive head;3.Fertilizer tube;4.Collection net bags;5.BDS+GPS antenna;6.Fertilizer controller.图12 风送式集中排肥系统田间试验Fig.12 Field experiment of air-assisted centralized fertilization system

表3 不同施肥量和肥料类型下的施肥量准确率Table 3 Accuracy rate of fertilizing quantity under different fertilizing quantity and fertilizer type
本研究针对外槽轮排肥装置施肥作业均匀性不高的问题,设计了一种采用“集中排肥+风送输肥”方式的风送式集中排肥装置,并开发了基于北斗+GPS硬件与限幅均值滤波算法的同步施肥控制系统。通过台架试验确定螺旋槽排肥轮的综合排肥性能优于直槽和交错槽排肥轮,螺旋槽排肥轮转速为60 r/min时,螺旋槽排肥轮各行排肥量一致性变异系数、排肥量稳定性变异系数和排肥量均匀性变异系数分别为1.57%、0.15%和2.32%;以台架试验获取施肥控制控制系统的施肥量调整响应时间,最长约为0.85 s;当理论施肥量为300~600 kg/hm2,田间试验的平均作业速度为5.22 km/h时,施肥准确率>95%。该风送式集中排肥系统排肥量一致性和均匀性较好,同步排肥控制精度较高,可实现精量、均匀和同步施肥。
猜你喜欢凹槽施肥量化肥7月我国化肥进口量增加中国化肥信息(2022年9期)2022-11-25蔬菜施肥量控制技术指南现代农村科技(2022年9期)2022-08-16现代农业离不开化肥今日农业(2021年19期)2022-01-12化肥农药减量,怎么减?今日农业(2021年4期)2021-06-09一种智能立式压滤机专用的塑料滤板橡塑技术与装备(2021年6期)2021-03-19双面圆弧凹槽细颈的高速铣削加工制造技术与机床(2018年10期)2018-10-13化肥需求增长不均 有人欢喜有人忧中国化肥信息(2018年2期)2018-08-23环形凹槽类铸件铸造工艺中国铸造装备与技术(2017年3期)2017-06-21水果红薯无土高产栽培的最佳施肥量研究湖南农业科学(2014年20期)2014-02-27省工棉2号最佳种植密度及最适施肥量的研究湖南农业科学(2014年8期)2014-02-27